Quando alguém lhe fala algo sobre jipes robóticos que exploram outros corpos celestes você deve logo se lembrar da dupla americana Spirit e Opportunity, as duas sondas que fazem parte do programa Mars Exploration Rovers. Você também pode lembrar-se do pequeno Sojourner, parte da missão Mars Pathfinder em 1997.
Esse tipo de sonda é muito útil para explorações de superfície, já que pode se deslocar e analisar diferentes tipos de terreno, aumentando a quantidade de informações a respeito de uma região. Pode ser útil também como precursora da visita humana à um determinado local, analisando as propriedades mecânicas do solo e medir níveis de radiação e luminosidade.
Pensando nisso, a União Soviética preparou, em meados da década de 60, um programa chamado Lunokhod. O objetivo era construir um jipe robótico que seria enviado ao local de aterrissagem na Lua pretendido pelo programa tripulado soviético, em andamento nessa época. Lá o veículo colheria informações do local e serviria como um plano B. Em caso de emergência, o cosmonauta que estivesse na Lua poderia ser levado a um módulo de aterrissagem reserva, já na Lua, e voltar para a nave de cruzeiro que o esperava em órbita. Bastaria que ele subisse no veículo, já que ele seria controlado da Terra. Um auxílio adicional ao programa era que o Lunokhod poderia ajudar no pouso de ambas as naves, emitindo pulsos de rádio rastreáveis, como um farol.
Como os soviéticos tiveram problemas com a peça principal do programa tripulado, o colossal lançador N1, todo ele foi cancelado. O Lunokhod, entretanto, foi reaproveitado para um programa de exploração remota lunar, complementando o bem-sucedido programa Luna.


No total quatro veículos foram construídos para serem enviados à Lua, estes receberam os nomes-código de 201, 203, 204 e 205.
A missão do Lunokhod 201 fracassou. Durante o seu lançamento pelo foguete Proton-K, em 19 de fevereiro de 1969, a sonda foi destruída com a explosão do foguete. Todos os dados referentes a carga útil deste lançador foram classificados (tornaram-se secretos) e o mundo nunca soube por muitos anos.
O Lunokhod 203, chamado oficialmente de Lunokhod 1, foi lançado em 10 de novembro de 1970, junto com seu veículo de aterrissagem Luna 17, uma versão adaptada do utilizado pela missão de retorno de amostras Luna 16. A alunissagem ocorreu em 17 de novembro de 1970, as 06h28min UTC, na região da face visível da Lua conhecida como Mare Imbrium (latim para Mar das Chuvas). Uma grande planície coberta que um dia foi coberta de lava (hoje basalto) onde também pousou a Apollo 15 em julho de 1970. Sua missão chegou ao fim no dia 4 de outubro de 1971, tendo percorrido 10.540 m e resistido há 11 dias lunares. Também enviou 206 imagens panorâmicas de alta resolução e mais de 20.000 imagens de TV.
 |
| Lunokhod 2 |
O Lunokhod 204, conhecido como Lunokhod 2, foi lançado em 8 de Janeiro de 1973 com o aterrizador Luna 21. Pousou na Lua com sucesso em 15 de Janeiro de 1973, as 23H35min UTC na cratera Le Monnier. Após a alunissagem, a sonda tirou algumas imagens dos arredores e desceu pelas rampas do aterrizador as 01h14min UTC do dia seguinte. Na superfície ele tirou mais algumas fotos dos arredores, inclusive do veículo Luna 21.
Ele permaneceu em funcionamento até 4 de Julho de 1973, percorrendo 37 km de terreno e enviando 87 imagens panorâmicas e mais de 80.000 imagens de TV. Ele é, ainda hoje, o detentor do recorde de maior distância percorrida em outro corpo celeste.
 |
| Lunokhod 3 (Fonte) |
O Lunokhod 205, ou Lunokhod 3, foi construído para ser lançado em meados de 1977, porém nunca o foi devido a falta de lançadores e de verbas. Tanto o Lunokhod 3 quanto seu aterrizador Luna, ao qual nenhum número foi designado, estão em exposição no museum Lavochkin, mantido pelo escritório de projetos que projetou e construiu a série Lunokhod. Uma boa notícia é que, após 30 anos, este exemplar ainda funciona.
Sua parte superior possui um formato convexo, em parte por este suportar melhor o estresse da pressão do ar no interior do veículo. Sobre ela foi montado um dos conjuntos de painéis solares do veículo e uma tampa côncava móvel, que além de abrigar o segundo conjunto de painéis solares e expô-los ao Sol quando aberta, também ajuda a isolar termicamente , quando fechada, o compartimento pressurizado durante as noites lunares.
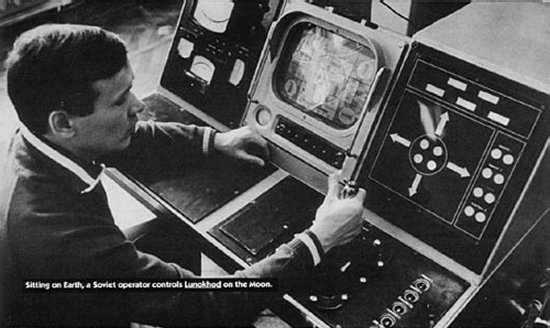
Os controladores ativavam o Lunokhod e recolhiam algumas imagens dos arredores, de modo a decidir qual rampa oferecia melhores condições. Algumas horas depois, através do um comando feito em um joystick, a sonda atravessava a rampa e atingia a superfície lunar. Mais algumas imagens dos arredores eram feitas, algumas inclusive do aterrizador, fornecendo dados muito úteis aos engenheiros que desenhariam as próximas missões.
Fontes:
http://en.wikipedia.org/wiki/Lunokhod_1
http://en.wikipedia.org/wiki/Lunokhod_2
http://en.wikipedia.org/wiki/Lunokhod_programme
http://danielmarin.blogspot.com/2010/03/las-huellas-sovieticas-en-la-luna.html
http://danielmarin.blogspot.com/2009/07/recordando-al-luna-15.html
http://www.astronautix.com/craft/lunokhod.htm
http://www.astronautix.com/craft/lunaye8.htm
http://www.zarya.info/Diaries/Luna/Luna17.php
http://www.mentallandscape.com/V_Cameras.htm (informações sobre as câmeras)
Aterrizador Luna 17 e 21
 |
| (Fonte) |
 |
| Luna 25, no museu Lavochkin (Fonte) |
A sonda Lunokhod não poderia chegar à superfície da Lua sozinha, pois os engenheiros precisariam incorporar a sonda equipamentos que somente seriam necessários na fase de pouso e, na já na superfície, sua única serventia seria aumentar a massa da sonda e fazê-la gastar mais energia.
Portanto os engenheiros da Lavochkin usaram o módulo de pouso, de quatro metros de diâmetro, da missão anterior, a Luna 16, que deveria pousar na Lua e retornar amostras da superfície. Acima deste seguiam o módulo de ascensão e uma cápsula onde as amostras ficariam armazenadas até sua volta a Terra.
Este módulo era composto por quatro tanques esféricos, onde eram armazenados ácido nítrico e hidrazina para os motores de foguete principais, do sistema secundário e do sistema de controle de altitude, tanques menores, com fluido de pressurização (servia para empurrar o combustível para os tanques com a pressão necessária. Geralmente é usado hélio ou nitrogênio para este fim, porém não consegui achar uma fonte que me informasse), quatro suportes, com “pés” parabólicos e amortecedores. Entre os tanques principais haviam compartimentos pressurizados onde os aviônicos (nome dado aos sistemas eletrônicos embarcados que controlam a nave) eram protegidos do ambiente espacial. Dois conjuntos de tanques de combustível extras, com seus próprios motores de foguete, foram fixados às laterais do módulo para a etapa de inserção orbital lunar. Antes de iniciar as manobras que levariam o Lunokhod a superfície, eles eram ejetados para aliviar peso. Dois sistemas de motores, principal e secundário, foram instalados para atuar em diferentes fases da missão. O motor principal era um KTDU-417 (11D417), capaz de desenvolver 18,9 kN e 314 segundos de impulso específico. O sistema secundário dispunha de quatro tubeiras dispostas ao redor do motor principal, capazes de desenvolver 3,43 kN. Os principais estavam encarregados das primeiras fases da aproximação, já os secundários atuariam quando a sonda estivesse próxima do solo.
Quanto à eletrônica abordo desse módulo estavam instalados um radar Doppler DA-018 fornecia informações a respeito da velocidade de aproximação, altitude e terreno. As informações sobre altitude eram verificadas por um altímetro, modelo Vega. Ainda havia um detector de raios gama, Kvant-2, usado para determinar se a sonda estava próxima ao solo, corroborando os dados dos outros instrumentos. Comunicava-se com a Terra através de duas antenas cônicas omnidirecionais, operando nas frequências 768 e 922 MHz.
Especificamente para as missões Lunokhod, o aterrizador recebeu dois pares de rampas, instaladas nos lados que os tanques extras não ocupavam. Sua função, obviamente, era permitir que o robô descesse do módulo Luna para a superfície lunar. Era composta por duas peças planas com duas articulações, uma no começo da rampa e outra no meio. Também recebeu uma interface especial para acomodar o Lunokhod sobre si, evitando que ele se desprendesse inesperadamente antes do momento certo.
 |
| Interface Luna/Lunokhod (Fonte) |
Lunokhod
Basicamente a sonda Lunokhod constitui-se de um compartimento pressurizado, onde a eletrônica de bordo e as baterias permanecem protegidas das duas condições do espaço, montada suspensão sobre rodas, cuja propulsão está sob responsabilidade de motores elétricos. Sobre esse compartimento pressurizado estão montados todos os instrumentos, antenas e o painel solar. No total a sonda pesava 840 kg, com dimensões de 135 cm x 160 cm x 170 cm (A x L x P). Descreverei mais detalhadamente os componentes a seguir.
 |
| (Fonte) |
Compartimento pressurizado
O ambiente lunar oferece muitos riscos a equipamentos para lá enviados. Os principais são a exposição à radiação cósmica e a variação de temperaturas, de 120 °C até 180 °C, que podem danificar os equipamentos eletrônicos do veículo. Para protegê-los os engenheiros projetaram um compartimento cônico onde todos os sistemas principais do veículo ficam localizados. Além disso, todos os equipamentos externos foram fixados a este compartimento, como as antenas e o retrorrefletor de laser.
 |
| Posterior da Sonda. O cilindro escuro é o RHU. Também é possível notar o Odômetro e o Penetrômetro(Fonte) |
Em seu interior a temperatura é mantida constante por um dispositivo chamado Unidade de Aquecimento por Radioisótopos (Radioisotope Heater Unit – RHU). O RHU está localizado na parte externa posterior do veículo. Constitui-se de um cilindro com uma carga de Polônio-210, dois tubos, por onde o ar pode circular, e um espelho côncavo, que evita que o veículo receba mais calor que o necessário. Seu funcionamento é muito simples. O Polônio-210 é um material radioativo que se converte em Chumbo-206 através de um processo conhecido como decaimento alfa. Além do Chumbo também é produzido calor, que é transferido para o compartimento pressurizado graças à convecção. O ar aquecido flui do RHU para a parte superior do compartimento, onde antes de aquecer os sistemas ele passa por pequenas ventoinhas, que forçam o ar quente a distribuir-se pelos compartimentos internos, ao invés de concentrar-se na parte superior.
 |
| RHU aproximadamente no centro da imagem (fonte) |
 |
| O cilindro ao centro da imagem é a Unidade de Aquecimento por Radioisótopos (RHU). Atrás estão o velocímetro e o penetrômetro. (Fonte) |

A sonda dispunha de oito rodas, independentes, para locomover-se na superfície. Elas foram agrupadas em pares, dois pares de cada lado, montadas com amortecedores, motores elétricos e freios próprios. Cada par era montado em um suporte articulável, permitindo que elas acompanhassem o perfil do terreno.
As rodas tinham um diâmetro de 51 cm e eram totalmente metálicas, constituíam-se de três aros ligados a um eixo por raios, semelhando ao arranjo de uma roda de bicicleta. Os aros eram cobertos por uma malha metálica e, sobre esta, pequenos crampons foram fixados para melhorar a tração no arenoso terreno lunar.
No centro de cada roda, local em que os raios eram fixados, havia um pequeno compartimento pressurizado onde motores elétricos e os freios foram abrigados. Esses motores possuíam a capacidade de movimentar a sonda em duas velocidades, 1 km/h e 2km/h, tanto para a frente com para trás. Como as rodas não tinha a capacidade de girar no eixo vertical, igual às dianteiras de um carro, o computador girava as rodas de cada lado em sentidos opostos, caso este estivesse parada, ou em velocidades diferentes, no caso de estar em movimento, como num tanque de guerra. E, ainda, para evitar que as peças fundissem juntas, um lubrificante baseado em fluoreto foi desenvolvido, já que os disponíveis evaporavam no espaço.
Caso algum motor falhasse, e a roda travasse, os controladores poderiam acionar uma pequena carga explosiva no interior dos compartimentos dos motores para destruir o eixo e deixar a roda livre. Eles poderiam repetir esse processo com algumas rodas, já que para conseguir se movimentar eram necessárias somente duas rodas.
Câmeras
Uma das principais diferenças entre os Lunokhods estava nas câmeras. O Lunokhod 1 possuía dois tipos de câmeras: Panorâmicas e câmeras de TV. O número de câmeras panorâmicas manteve-se constante nos três robôs, um par de cada lado para cada robô. Seus sensores consistiam numa única linha de CCD (Charge-Coupled Device, semelhante ao das câmeras digitais atuais) apontada para um espelho móvel. Funcionavam do seguinte modo: o sensor começava a varredura a partir de uma das laterais, então o espelho girava em direção a outra extremidade da câmara, de modo que os pixels da varredura seguinte fossem adjacentes ao da anterior. As câmeras verticais eram capazes de retornar imagens cobrindo um campo de visão de 180° e as horizontais 360° (a resolução de suas imagens era de 500 x 6000 pixel), incluindo o céu e as estrelas, o solo, as rodas e um dispositivo que media a inclinação do veículo. Duas dessas câmeras podiam transmitir suas imagens ao mesmo tempo, em subportadoras de 130 kHz e 190 kHz.
 |
| Panorâmica do Luna 21 feito pelo Lunokhod 2 (Fonte) |
 |
| Panorâmica do Luna 21 feito pelo Lunokhod 2 (Fonte) |
As câmeras de TV foram instaladas com o propósito de prover o piloto do Lunokhod uma visão do solo imediatamente a frente do robô. Essas câmeras forneciam vídeo de 250 linhas com 10 quadros por segundo. O Lunokhod recebeu câmeras de TV melhores, além da adição de uma terceira câmera, acima das outras duas, para fins de navegação. Estas câmeras possuíam maior resolução e podiam gravar imagens com um tempo de 3,2, 5,1, 10,9 e 21,1 segundos por quadro.

Lista de instrumentos do Lunokhod-1
-Câmeras (2 de TV e 4 panorâmicas)
-Espectrômetro de Fluorescência de Raios-X
-Telescópio de Raios-X
-Odômetro
-Penetrômetro
-Detector de Radiação
-Refletor de Laser
Instrumentos do Lunokhod 2
- Câmeras (3 de TV e 4 panorâmicas)
- Espectrômetro de Fluorescência de Raios-X
- Telescópio de Raios-X
-Odômetro
-Penetrômetro
-Detector de Radiação
-Refletor de Laser
- Astrofotômetro UV/Luz visível
- Magnetômetro
- Fotodetector
- Sistema de Análise do Solo
O Odômetro permitia o cálculo da distância total percorrida e da velocidade do veículo, já que as rodas principais poderiam escorregar na superfície devido a sua tração. O Penetrômetro media as propriedades mecânicas do solo. O refletor de Laser, construído na França, permite que um pulso de laser enviado da Terra possa retornar. Com isso pode-se calcular a distância Terra-Lua com precisão de centímetros e esse instrumento pode ser usado até os dias atuais. O Astrofotômetro media a intensidade da luz no local onde estava e o Sistema de Análise de Solo emitia particular alfa em direção ao solo, para determinar sua composição. Quando era necessário usar esse equipamento o instrumento era baixado até o solo.
Noite Lunar
O dia lunar difere muito do dia terrestre. Como a Lua sofreu acoplamento de maré, sempre apresenta a mesma face para a Terra, portanto um dia tem a mesma duração de uma órbita ao redor da Terra, aproximadamente 27 dias. Para piorar a situação à noite, com duas semanas de duração, as temperaturas podem atingir -170°C ou menos, danificando qualquer sistema eletrônico que não esteja adequadamente protegido.
Para enfrentar esse problema os engenheiros da Lavochkin incluíram alguns dispositivos para manter a temperatura no interior da sonda dentro de níveis aceitáveis, alguns dos quais eu já citei, como o RHU e a cobertura móvel com painéis solares.
Quando a noite se aproximava, os controladores posicionavam o veículo em direção ao sol para aumentar a carga das baterias. Terminado esse processo ele era girado para o lado oposto, onde o sol nasceria no próximo dia, de modo que o os painéis pudessem aproveitar o máximo de luminosidade quando fosse reaberto. A tampa era fechada, para aumentar o isolamento térmico do veículo, a antena helicoidal apontada para a posição onde a Terra iria estar quando o dia nascesse e todos os sistemas desligados. Somente continuavam funcionando aqueles necessários para reativar a sonda.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Os Lunokhods foram enviados ao espaço através de foguetes Proton-K. Chegando ao espaço a sonda entrava numa órbita de espera, porém não chegava a completa-la. Um impulso feito pelo motor do último estágio do lançador fornecia energia suficiente para a sonda entrar numa órbita de transferência, cujo apogeu dar-se-ia nas proximidades da Lua. Quatro dias e meio e algumas correções de trajetória depois a sonda preparava sua injeção orbital. Para isso acontecer os controladores viravam sua “parte de baixo”, direção para onde os motores dos tanques extras encontravam-se e disparavam até a velocidade do conjunto ser baixa o suficiente para a Lua ser capaz de captura-la, porém suficientemente alta para manter uma órbita de aproximadamente 100 km x 90 km, com 60° de inclinação e um período de aproximadamente duas horas. Essa manobra é necessária, pois a Lua não seria capaz de capturar um objeto com tamanha energia. Caso contrário ela voltaria para a Terra dias depois ou sua velocidade aumentaria com o “efeito estilingue” lunar e permaneceria por anos em órbita heliocêntrica.
Em órbita lunar, medições precisas da trajetória foram realizadas com o radar Doppler da nave Luna e os tanques extras, agora vazios, eram descartados. Terminado esse processo um disparo do motor principal reduzia a perilua (correspondente do periastro) para um valor entre 15 e 21 km, e sua apolua (apoastro) permanecia em 100 km.
Ajustes nos instrumentos eram realizados e, 40 órbitas depois, outro disparo no motor principal, de 5 a 6 minutos, retira a sonda de órbita e a manda diretamente para o local de pouso desejado. Devido à baixa gravidade lunar, a sonda continuava em queda livre até que chegasse a uma altitude de 700 m. Nesse instante ou motores secundários assumiam a responsabilidade de diminuir a velocidade da sonda.
A 20 metros da superfície e velocidade de 2 m/s os motores secundários são desligados e a sonda cai auxiliada pelos motores de manobra. Entre 3 e 2 m de altura os motores auxiliares seriam cortados quando raios gama fossem detectados pelos sensores Kvant-2, assegurando que o pouso ocorresse a 5m/s. Concluído o pouso, o aterrizador estendia suas rampas e sua missão chegava ou fim.
 |
| Controle da Missão (Fonte) |
{kind=link}
 |
| Controle da Missão (Fonte) |
{kind=link}
 |
| Infográfico Lunokhod 2 (Fonte) |
{kind=link}
http://en.wikipedia.org/wiki/Lunokhod_1
http://en.wikipedia.org/wiki/Lunokhod_2
http://en.wikipedia.org/wiki/Lunokhod_programme
http://danielmarin.blogspot.com/2010/03/las-huellas-sovieticas-en-la-luna.html
http://danielmarin.blogspot.com/2009/07/recordando-al-luna-15.html
http://www.astronautix.com/craft/lunokhod.htm
http://www.astronautix.com/craft/lunaye8.htm
http://www.zarya.info/Diaries/Luna/Luna17.php
http://www.mentallandscape.com/V_Cameras.htm (informações sobre as câmeras)
Nenhum comentário:
Postar um comentário